
Recolección de datos con Robots
https://eduteka.net/articulos/RoboticaSondas
RECOLECCIÓN DE DATOS CON ROBOTS
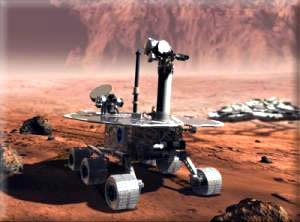
NOTICIAS DE ACTUALIDAD En enero de 2004 el robot "Spirit" empezó a enviar un número importante de fotografías de alta calidad de la superficie de Marte. El "Spirit" está equipado con una cámara estéreo que reproduce con fidelidad la visión humana y con un sofisticado panel de instrumentos científicos con los que se quiere averiguar si en Marte hubo agua en tiempos remotos; tiene seis ruedas y es mucho más grande y sofisticado que el celebre Robot "Sojourner" que llegó a Marte con la misión "Pathfinder" , en julio de 1997.
 |
||
|
Sonda espacial “Spirit” en la superficie de Marte
|
 |
||
|
Robot Industrial para soldar piezas
|
 |
||
|
Robot enfermero creado por la empresa japonesa Matsushita
|
 |
||
|
Prototipo de "Aracnobot" creado por la NASA.
|
 |
 |
 |
|
RCX de LEGO + Adaptador de Sensores
|
Sensores LEGO o DCP
|
Software ROBOLAB 2.x
|
 |
Sensor de Temperatura Funciona en un rango de temperaturas entre –20 y +50 grados Celcius. El RCX puede leer y mostrar las lecturas en grados Celsius o Fahrenheit (ref. W979889). |
|
 |
Sensor de Toque Sensor digital de 9 voltios calibrado como un interruptor “encendido/apagado” (ref. W779911). Este Sensor se puede utilizar para determinar cuando un Robot toca algo con el fin de que tome la decisión de regresar o cambiar de dirección. |
|
 |
Sensor de Luz Funciona en un rango de nivel de luz entre 0.6 y 760 unidades de intensidad de luz (ref. W779758). |
|
 |
Sensor de Rotación Lee 16 posiciones de rotación con un máximo de 500 revoluciones por minuto (RPM). El RCX puede leer tanto ángulos de rotación como dieciseisavas partes de un giro completo (ref. W979891). Se puede utilizar para controlar hasta donde debe estar abierta la puerta de un alimentador de aves con el fin de proveer cantidades diferentes de alimento a distintas horas del día. |
|
 |
Cámara Esta cámara LEGO ofrece a los estudiantes la funcionalidad de realizar películas; para utilizarla se debe adquirir el software para edición de imágenes (#979647). El software Red Rover (P990205-017) posibilita la construcción de un robot que simule el trabajo que realiza la sonda espacial “spirit” en Marte o que realice una misión de rescate. |
 |
Adaptador de Sensores DCP Para acoplar al RCX los sensores que se reseñan a continuación, es necesario utilizar un adaptador [3] como el que aparece en la imagen de la izquierda. Adicionalmente, se puede adquirir una extensión de 3 metros, como la de la imagen de la derecha, para lograr mayor movilidad dentro del laboratorio. |
 |
Sensor de Presión de Aire Mide la presión de aire y presiones barométricas. Utiliza la escala y unidades del Sistema Internacional de medidas (kilopascal; kPa). Funciona en un rango entre 0 y 200 kPa que equivale a un rango entre 0 y 30 libras por pulgada cuadrada (psi). Tiene una precisión nominal de ±9%. |
 |
Sensor de Humedad Viene envuelto en una caparazón de aluminio que lo hace muy resistente. Ofrece mediciones rápidas y con alta precisión para una rango de humedad relativa entre 0 y 100%. Tiene una precisión nominal de ±4%; el tiempo de respuesta ante cambios en las condiciones a medir es de menos de 1.5 segundos; y funciona en un rango de temperatura entre –20 y 80 grados Celsius. |
| Sonda pH Sonda diseñada especialmente para ser utilizada por estudiantes. Esta construida con material resistente y tiene un protector plástico para preservar la ampolleta de vidrio. |
|
 |
Amplificador de pH (Ajustable) Permite mediciones de pH más precisas pues permite calibrar la Sonda. Tiene un conector tipo BNC que acepta la mayoría de las sondas para pH disponibles en el mercado. |
| Sensor de Temperatura Diseñado para medir la temperatura de líquidos y gases. Tiene una Sonda de 180 milímetros en acero inoxidable. La precisión nominal es de ±1 grado Celsius para mediciones entre –10 y 60 grados Celsius. |
|
 |
Sensor de Movimiento y Posición Sensor de rotación con un torque muy bajo que ofrece entre 0 y 340 posiciones de grados angulares. Además, puede medir distancias lineales. |
 |
Sensor de Nivel de Sonido Diseñado para medir niveles de sonido con respuesta similar a la del oído humano (400Hz a 4KHz). Funciona en un rango entre 50 y 100 dBA, su precisión nominal es de ±5 dBA y el tiempo de respuesta es de aproximadamente 0.5 segundos. |
 |
Sonda para Corriente Directa Este adaptador y sonda permite medir de manera fácil la corriente directa (DC) en un circuito eléctrico. Funciona con un máximo de 25 voltios y con una precisión nominal de ±1%. |
 |
Sensor de Aceleración Sensor pequeño y resistente para medir la aceleración, incluyendo la que se produce por efecto de la gravedad. Además, permite medir grados de inclinación en un rango que va de –90 a +90 grados. |
 |
Sensor de Nivel de Luz Mide la intensidad de la luz; muy útil para monitorizar y registrar tendencias y cambios en los niveles de luz natural. La precisión es de ±9%, funciona en un rango entre 0 y 25000 unidades de luminosidad (Lux), y el punto de calibración es de 5000 Lux (luz natural). |
|
|
|
Sonda espacial “Spirit” en la superficie de Marte
|
El consorcio ABB anunció la creación de un robot industrial capaz de arrojar una pelota a una canasta de baloncesto. Stönke Kock, coordinador del proyecto, dijo que no se trata de un simple juego; el robot, que se puede utilizar en la industria para soldar piezas, cuenta con un sensor que informa al computador la posición y el tamaño de la ranura que va a cerrar u obturar, y este corrige la posición y la velocidad del procedimiento para obtener una soldadura perfecta. Kock subrayó que los robots con sensores especiales se pueden utilizar en la industria automotriz, así como en la construcción de barcos y de vagones de trenes, donde en un futuro se aplicará la soldadura láser.
|
|
|
Robot Industrial para soldar piezas
|
La compañía Pyxis Corp presentó recientemente un robot capaz de transportar equipo médico, comida y medicamentos. Este Robot puede recordar más de 30 destinos dentro de un hospital gracias a un sónar y sensores infrarrojos. Antes de moverse emite mensajes hablados como “voy a moverme, por favor aléjese” y si alguien interrumpe su camino, se detiene y busca vías alternas. Por otra parte, las universidades Carnegie Mellon y Pittsburgh en Estados Unidos desarrollaron un robot enfermero capaz de recordarles a los enfermos cuándo tomar sus medicamentos, alertar si alguno sufre una caída y proporcionar un enlace entre médico y paciente utilizando Internet. En julio de 2002, la empresa japonesa Matsushita anunció la construcción de un robot similar, capaz de tomar en los pacientes: temperatura, tono muscular, pulso y otras variables gracias a una serie de sensores específicos; una vez reunidas las mediciones, procede a enviarlas por medio de telefonía celular a un centro médico para que sean revisadas.
|
|
|
Robot enfermero creado por la empresa japonesa Matsushita
|
Investigadores del Jet Propulsion Laboratory (JPL, por su sigla en inglés) de la NASA crearon un prototipo de Robot con forma de araña al cual llamaron “Aracnobot”. Este puede interactuar con sustancias que representen riesgo para los seres humanos, tomar medidas de terrenos difíciles o explorar entornos en los cuales los Robots con ruedas no pueden desenvolverse eficazmente. El “Aracnobot” detecta obstáculos mediante antenas sensibles al tacto y posee cámaras para sondear el medio ambiente que lo rodea.
|
|
|
Prototipo de "Aracnobot" creado por la NASA.
|
También te podría interesar
Redes de datos en instituciones de educación básica y media
Ver artículoRecursos para Robótica
Ver artículoColombia: Introducción Recursos en EDUTEKA para cumplir con los Estándares en Ciencias Naturales
Ver artículoNETS-T 2008: Matriz de Valoración para Experiencias de Aprendizaje y Evaluaciones en La Era Digital
Ver artículoLas historias anteriores son extractos de noticias que tienen algo en común: Robots y Sensores. Aunque los robots de las noticias son bastante sofisticados, estos tienen cada día mayor presencia en la vida cotidiana de las personas. La definición de Robot incluye artefactos tan comunes como las puertas automáticas de los supermercados, los semáforos, las maquinas contestadoras, los reproductores de VHS, los hornos microondas, las máquinas dispensadoras de bebidas, las fotocopiadoras y los detectores de humo.
Por su parte, los Sensores se encargan de suministrar a los Robots la información necesaria para que puedan tomar decisiones e interactuar con su entorno, de la misma manera en la que sirven los órganos de los sentidos a los seres vivos. Un sensor de contacto puede ayudar a un robot a que realice una acción como apagar o prender una luz o un motor; un sensor de voltaje le indica a una máquina contestadora que está entrando una llamada telefónica; o un sensor de temperatura le permite a un horno controlar la cantidad de calor que debe producir.
RECOLECCION DE DATOS
Las compañías LEGO y DCP se han unido para ofrecer un juego de piezas que se puedan utilizar en la clase de Ciencias Naturales para diseñar Robots que interactúen con el entorno y Recolecten Datos [2]. Las instituciones educativas que cuentan actualmente con ladrillos programables de LEGO (RCX) o tienen planeado adquirirlos [1], pueden explorar la opción de realizar una inversión adicional en sensores para tener un sistema completo de recolección de datos, ampliando de esta manera el uso de los elementos adquiridos para los clubes de robótica.
Para Recolectar Datos con Robots de LEGO [1] se necesitan los siguientes elementos:
|
|
|
|
RCX de LEGO + Adaptador de Sensores
|
Sensores LEGO o DCP
|
Software ROBOLAB 2.x
|
RCX DE LEGO + ADAPTADOR
http://www1.lego.com/education/default.asp?page=7_1&productid=9709
 El “Ladrillo Programable” de LEGO, conocido como RCX, es una microcomputadora programable que puede procesar datos, enviar señales a los puertos de salida (para mover motores, encender lámparas, etc), y recibir información de sensores conectados a sus puertos de entrada. El RCX realiza las funciones de una interfaz recolectora de datos, que transfiere al computador la información proveniente de los Sensores.
El “Ladrillo Programable” de LEGO, conocido como RCX, es una microcomputadora programable que puede procesar datos, enviar señales a los puertos de salida (para mover motores, encender lámparas, etc), y recibir información de sensores conectados a sus puertos de entrada. El RCX realiza las funciones de una interfaz recolectora de datos, que transfiere al computador la información proveniente de los Sensores.
Algunos Sensores como los de temperatura, toque, luz o ángulo, son fabricados por LEGO y se pueden conectar directamente a los puertos de entrada del RCX. Para ampliar la variedad de Sensores que se puedan utilizar con los “ladrillos programables”, la empresa DCP produce al menos una docena de estos dispositivos que se pueden conectar al RCX por medio de un adaptador [3].
SENSORES
Los Sensores son elementos clave en los sistemas de recolección de datos. Estos se pueden utilizar para registrar cambios ambientales en función del tiempo o para registrar el lapso de tiempo que transcurre entre un hecho y otro. Los sensores análogos miden variables tales como temperatura, luz, presión o humedad. Los sensores digitales miden si un interruptor está prendido o apagado y generalmente se usan para cronometrar o señalar acontecimientos. En el artículo “Sugerencias para el Uso de Sensores y Sondas” se presentan una serie de ideas sencillas y prácticas para utilizar los Sensores en educación Básica y Media. Incluye cientos de experimentos fáciles de realizar con ellos que miden: oxígeno disuelto, luz, dióxido de carbono, fuerza, pH, sonido, conductividad, magnetismo, presión, humedad, temperatura y corriente eléctrica.
SENSORES LEGO
http://www.lego.com/eng/education/mindstorms/home.asp?pagename=input
|
Sensor de Temperatura Funciona en un rango de temperaturas entre –20 y +50 grados Celcius. El RCX puede leer y mostrar las lecturas en grados Celsius o Fahrenheit (ref. W979889). |
|
Sensor de Toque Sensor digital de 9 voltios calibrado como un interruptor “encendido/apagado” (ref. W779911). Este Sensor se puede utilizar para determinar cuando un Robot toca algo con el fin de que tome la decisión de regresar o cambiar de dirección. |
|
Sensor de Luz Funciona en un rango de nivel de luz entre 0.6 y 760 unidades de intensidad de luz (ref. W779758). |
|
Sensor de Rotación Lee 16 posiciones de rotación con un máximo de 500 revoluciones por minuto (RPM). El RCX puede leer tanto ángulos de rotación como dieciseisavas partes de un giro completo (ref. W979891). Se puede utilizar para controlar hasta donde debe estar abierta la puerta de un alimentador de aves con el fin de proveer cantidades diferentes de alimento a distintas horas del día. |
|
Cámara Esta cámara LEGO ofrece a los estudiantes la funcionalidad de realizar películas; para utilizarla se debe adquirir el software para edición de imágenes (#979647). El software Red Rover (P990205-017) posibilita la construcción de un robot que simule el trabajo que realiza la sonda espacial “spirit” en Marte o que realice una misión de rescate. |
SENSORES DCP
|
Adaptador de Sensores DCP Para acoplar al RCX los sensores que se reseñan a continuación, es necesario utilizar un adaptador [3] como el que aparece en la imagen de la izquierda. Adicionalmente, se puede adquirir una extensión de 3 metros, como la de la imagen de la derecha, para lograr mayor movilidad dentro del laboratorio. |
|
Sensor de Presión de Aire Mide la presión de aire y presiones barométricas. Utiliza la escala y unidades del Sistema Internacional de medidas (kilopascal; kPa). Funciona en un rango entre 0 y 200 kPa que equivale a un rango entre 0 y 30 libras por pulgada cuadrada (psi). Tiene una precisión nominal de ±9%. |
|
Sensor de Humedad Viene envuelto en una caparazón de aluminio que lo hace muy resistente. Ofrece mediciones rápidas y con alta precisión para una rango de humedad relativa entre 0 y 100%. Tiene una precisión nominal de ±4%; el tiempo de respuesta ante cambios en las condiciones a medir es de menos de 1.5 segundos; y funciona en un rango de temperatura entre –20 y 80 grados Celsius. |
| Sonda pH Sonda diseñada especialmente para ser utilizada por estudiantes. Esta construida con material resistente y tiene un protector plástico para preservar la ampolleta de vidrio. |
|
|
Amplificador de pH (Ajustable) Permite mediciones de pH más precisas pues permite calibrar la Sonda. Tiene un conector tipo BNC que acepta la mayoría de las sondas para pH disponibles en el mercado. |
| Sensor de Temperatura Diseñado para medir la temperatura de líquidos y gases. Tiene una Sonda de 180 milímetros en acero inoxidable. La precisión nominal es de ±1 grado Celsius para mediciones entre –10 y 60 grados Celsius. |
|
|
Sensor de Movimiento y Posición Sensor de rotación con un torque muy bajo que ofrece entre 0 y 340 posiciones de grados angulares. Además, puede medir distancias lineales. |
|
Sensor de Nivel de Sonido Diseñado para medir niveles de sonido con respuesta similar a la del oído humano (400Hz a 4KHz). Funciona en un rango entre 50 y 100 dBA, su precisión nominal es de ±5 dBA y el tiempo de respuesta es de aproximadamente 0.5 segundos. |
|
Sonda para Corriente Directa Este adaptador y sonda permite medir de manera fácil la corriente directa (DC) en un circuito eléctrico. Funciona con un máximo de 25 voltios y con una precisión nominal de ±1%. |
|
Sensor de Aceleración Sensor pequeño y resistente para medir la aceleración, incluyendo la que se produce por efecto de la gravedad. Además, permite medir grados de inclinación en un rango que va de –90 a +90 grados. |
|
Sensor de Nivel de Luz Mide la intensidad de la luz; muy útil para monitorizar y registrar tendencias y cambios en los niveles de luz natural. La precisión es de ±9%, funciona en un rango entre 0 y 25000 unidades de luminosidad (Lux), y el punto de calibración es de 5000 Lux (luz natural). |
SOFTWARE ROBOLAB 2.x
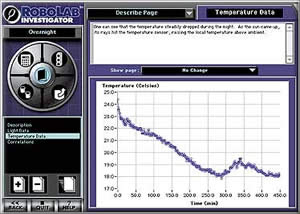
http://www.lego.com/eng/education/mindstorms/home.asp?pagename=investigator
Es un lenguaje de programación gráfico creado por un consorcio conformado por: National Instruments, LEGO Dacta, y la Universidad de Tufts. Está dirigido al sector educativo y es muy similar a la construcción de diagramas de flujo.
ROBOLAB tiene tres fases de programación progresivas:
Los datos se pueden cargar al computador por medio de la torre de infrarrojos. Luego, se puede utilizar el software Robolab para analizarlos y compararlos. La opción “Journal Tool” de Robolab puede ser utilizada por los estudiantes para:
-
“Pilot” es un entorno básico en el cual se construyen programas por medio de la interfaz gráfica.
-
“Inventor” provee un ambiente de programación basado en íconos.
-
“Investigator” [4] extiende el uso de los Robots de Lego MindStorm ya que posibilita la creación de experimentos en los cuales se diseñan y programan Robots para recolectar datos [2].
-
Registrar sus hipótesis.
-
Registrar sus hallazgos.
-
Adicionar cuadros y datos para sustentar conclusiones.
-
Publicar los resultados en forma de presentación multimedia
NOTAS DEL EDITOR:
[1] También hay Sensores disponibles para los Crickets http://www.gleasonresearch.com/. Además, existen páginas Web en los cuales se indica como, con conocimientos básicos de electrónica, se pueden construir Sensores.
[2] Ver el artículo “Recolección de Datos” en el que con la utilización de computadores, sensores y sondas se introduce el tema de la Recolección de Datos y sus implicaciones en el aprendizaje de las Ciencias Naturales. Esta, permite a los estudiantes realizar trabajo de campo, obtener información inmediata y convertirla en gráficos que facilitan su comprensión y análisis. http://www.eduteka.org/RecoleccionDatos
[3] Adaptador de Sensores: LEGO-DCP Sensor Adapter D-9917.
[4] La fase “Investigator” del software Robolab emplea programación tanto de la fase “Pilot”, como de la fase “Inventor”. Adicionalmente, “Investigator” incluye comandos especiales para recolección de datos.
CRÉDITOS:
Documento elaborado por EDUTEKA con información proveniente de:
-
DCP Microdevelopments http://www.dcpmicro.com/lego/index.htm
-
Recursos para Robótica en Internet http://www.eduteka.org/RoboticaRecursos.php
-
Educational Experience http://www.edex.com.au/lego/news/index
-
Super Robótica http://www.superrobotica.com/Sensores.htm
Publicación de este documento en EDUTEKA: Mayo 22 de 2004.
Última modificación de este documento: Mayo 22 de 2004.




