
https://eduteka.icesi.edu.co/articulos/RoboticaToque
INTRODUCCIÓN A ROBOLAB
Lección 4: SENSORES DE TOQUE

OBJETIVOS

- Modificar y programar un carro que pueda moverse hacia adelante, tocar un obstáculo, dar la vuelta, y cruzar la línea de meta.
- Usar un sensor de toque para indicar a un vehículo robótico que cambie de dirección
MATERIALES
- Un Juego de Piezas (kit) de LEGO (uno o dos grupos de estudiantes por kit)
- El Software ROBOLAB [3] versión 1.5 o superior, en el nivel Pilot 4
- Carros elaborados en la Lección No. 1 (http://www.eduteka.org/RoboticaCarro.php)
- La Hoja de Planeacion del Pilot Nivel 4 (http://www.eduteka.org/pdfdir/PilotNivel4.php)
- La Hoja de Iconos del Nivel Pilot (http://www.eduteka.org/pdfdir/IconosNivelPilot.php)
- Matriz de Valoración [Rubrics [1]] (opcional)
- Computador
- Puerto Infrarrojo
TIEMPO
2 o 3 periodos de clase de 45 minutos cada una
VOCABULARIO
- Sensor de Toque - touch sensor
- Obstáculo - obstacle
- Esperar el toque - wait for push
- Esperar que suelte - wait for release
PROCEDIMIENTO
Introducción
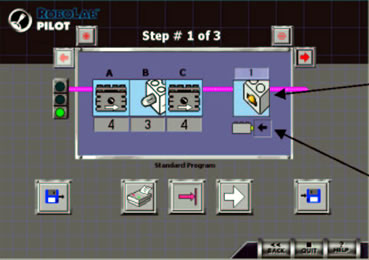
- Muestre a los estudiantes los sensores de toque y pregúnteles de qué maneras se podrían usar estos en sus diseños. Busque el Pilot Nivel 4 e indique en qué momento deben los estudiantes usar el icono de sensor de toque apuntando la dirección de la flecha hacia el sensor y cuando deben ellos utilizar un icono con la dirección de la flecha apuntando hacia fuera del sensor.
- Asigne el reto de diseñar
Modifique y programe el carro de su equipo, para que avance desde la línea de inicio, sienta o perciba un obstáculo tal como un muro, gire, y retorne atravesando nuevamente la línea de inicio
También te podría interesar
Recolección de datos con Robots
Ver artículoElementos Fundamentales para la Planeación de Proyectos Colaborativos en Internet
Ver artículoLo invitamos a ver las Moléculas
Ver artículoLo invitamos a ver las Moléculas
Ver artículo
- Acuerde de qué manera se pueden fijar los sensores de toque, para evitar que se desprendan cuando choquen con un obstáculo.
- Acuerde qué velocidad debe tener el carro para que pueda hacer el recorrido sin que se desbarate cuando choque con algún obstáculo.
Diseño
1. Los estudiantes deben modificar los carros para incluir un sensor de toque.
2. Provea cada grupo con una Hoja de Planeación del Pilot Nivel 4 y una Hoja de Iconos [2]. Los estudiantes deben recortar los iconos que necesiten y colocarlos en la hoja del planeación para mostrar como luciría su programa.
Programación y prueba
1. Una vez aprobada la Hoja de Planeación de ROBOLAB [3], los estudiantes deberán programarla en el computador y dirigirse luego al área asignada para ensayar los vehículos. Deben revisar sus programas las veces que sea necesario hasta que los carros cumplan satisfactoriamente su tarea o el tiempo de la clase termine.
2. Organizar una presentación para que los distintos grupos puedan mostrar sus carros.
EVALUACIÓN
- El carro de cada grupo debe estar en capacidad de moverse hacia adelante, golpear suavemente un obstáculo como un muro, girar, y atravesar la línea de llegada.
- Cada uno de los miembro del grupo debe estar en capacidad de explicar el programa, los problemas que surgieron durante el proyecto y la forma en que el grupo los solucionó.
- Cada uno de los estudiantes debe registrar en un diario sus experiencias. Estudiantes de grados inferiores pueden ilustrar sus procesos. Sugerencias de preguntas para el diario
- Explique su programa elaborado en ROBOLAB [3]. ¿Cómo pudo su grupo elaborar el carro para que completara la tarea?.
- ¿Cómo modifico su grupo el carro para incluir un sensor de toque? ¿Qué problemas ocurrieron, si se presento alguno?
- Describa que hizo su carro cuando lo ensayó en clase. ¿Estuvo su grupo satisfecho con el resultado?. ¿Por qué sí o por qué no?. ¿Cómo podría usted mejorar su carro?
- Explique las palabras del vocabulario que utilizó su grupo mientras completaba el proyecto.
EXTENDIENDO LAS IDEAS
Programe un carro que se deslice a través de una superficie plana elevada, como una mesa, sin caerse. El carro debe moverse hacia delante, sentir el borde de la superficie, detenerse, dar la vuelta y avanzar en dirección opuesta hasta encontrar el otro borde de la mesa. Se debe instalar en el carro un sensor de toque de tal manera que cuando llegue a un vacío, un brazo u otro tipo de estructura se mueva para presionar o soltar el sensor. Se puede usar más de un sensor de toque. El vehículo debe permanecer en movimiento sin caerse por el borde de la mesa.
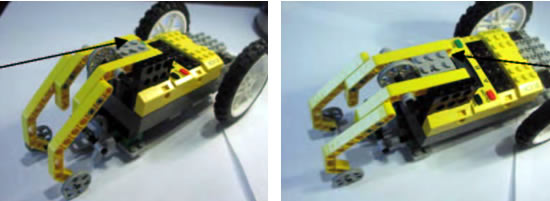
En este ejemplo se libera un sensor de toque cuando el carro alcanza el borde de la superficie.
CONSEJOS PARA EL MAESTRO
- Los estudiantes pueden colocar el sensor de toque en el frente del carro. Ellos descubrirán que el sensor de toque se debe reforzar para prevenir que se caiga cuando golpee un obstáculo.
Ensaye también colocar una piezas de LEGO enfrente del sensor de toque. Cuando la pieza de LEGO haga contacto con el muro, presionará el sensor de toque, lo que dará por resultado que el carro cambie de dirección. - Los estudiantes descubrirán que el carro puede realizar con mayor facilidad la tarea completa si retrocede del muro antes de dar la vuelta.
- Nuevos Iconos:
|
Sensor de Toque |
|
|
|
|
|
Espere la presión - espere a que el sensor de toque sea presionado antes de la siguiente acción |
Espere soltar o liberar – espere a que el sensor de presión se suelte o libere antes de la siguiente acción |



NOTAS DEL EDITOR:
[1] Una Matriz de Valoración (Rúbrica - Rubric en inglés) facilita la Calificación del desempeño del estudiante en las áreas del currículo (materias o temas) que son complejas, imprecisas y subjetivas. Esta Matriz podría explicarse como un listado del conjunto de criterios específicos y fundamentales que permiten valorar el aprendizaje, los conocimientos y/o las competencias, logrados por el estudiante en un trabajo o materia particular. http://www.eduteka.org/MatrizValoracion.php
[2] Descargue en formato PDF la Hoja de Planeación del Pilot Nivel 4 (http://www.eduteka.org/pdfdir/PilotNivel4.php); y la Hoja de Iconos del Nivel Pilot (http://www.eduteka.org/pdfdir/IconosNivelPilot.php)
[3] Robolab es un lenguaje de programación gráfico creado por un consorcio conformado por: National Instruments, LEGO Dacta, y la Universidad de Tufts. Está dirigido al sector educativo y es muy similar a la construcción de los diagramas de flujo. Tiene tres fases de programación progresivas: 1) “Pilot” es un entorno básico en el cual se construyen programas por medio de la interfaz gráfica; 2) “Inventor” provee un ambiente de programación basado en íconos; y 3) “Investigator” extiende el uso de los Robots de Lego MindStorm ya que posibilita la creación de experimentos en los cuales se diseñan Robots, se programan estos y se recolectan datos.
CRÉDITOS:
Traducción al español realizada por EDUTEKA del proyecto “Touch Sensors” escrito por Kathleen Crowe como parte del documento “An Introduction To Robolab; Developing programming and engineering skills in the classroom” http://www.engr.utexas.edu/dteach/Experience/control/brief_KCLessons.htm, publicado por el proyecto “Design Technology and Engineering for America’s Children (DTEACh)” de la Universidad de Texas, Austin, Estados Unidos http://www.engr.utexas.edu/dteach/Default.htm.
Las imagines fueron tomadas de la versión del mismo proyecto publicado por “Robotics on the Web” http://www1.webramp.net/Crowesclassroom/roboticshomepage.htm
Publicación de este documento en EDUTEKA: Mayo 22 de 2004.
Última modificación de este documento: Mayo 22 de 2004.


